Where the flood lava of two gigantic Martian volcanoes meet
Click for original image.
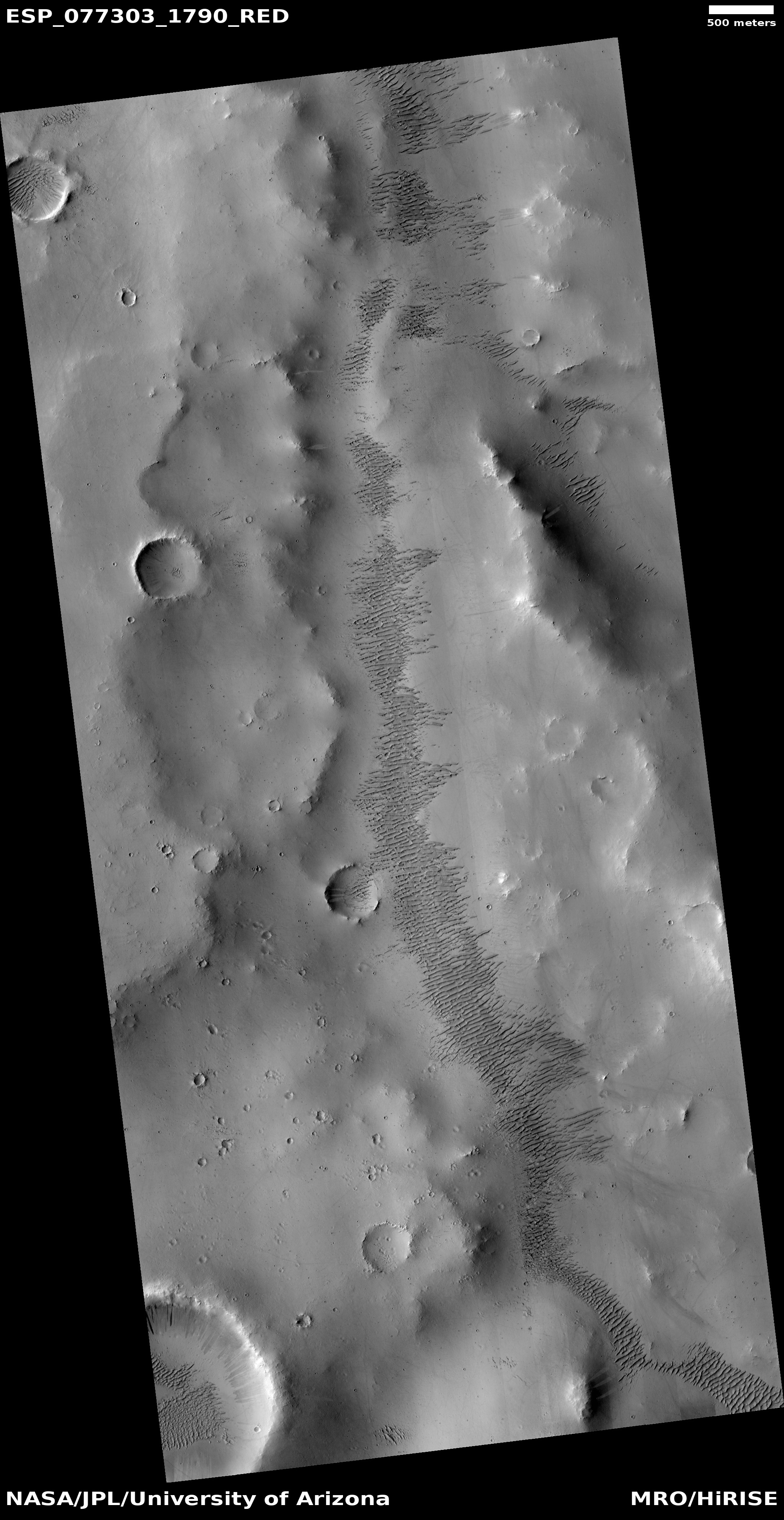
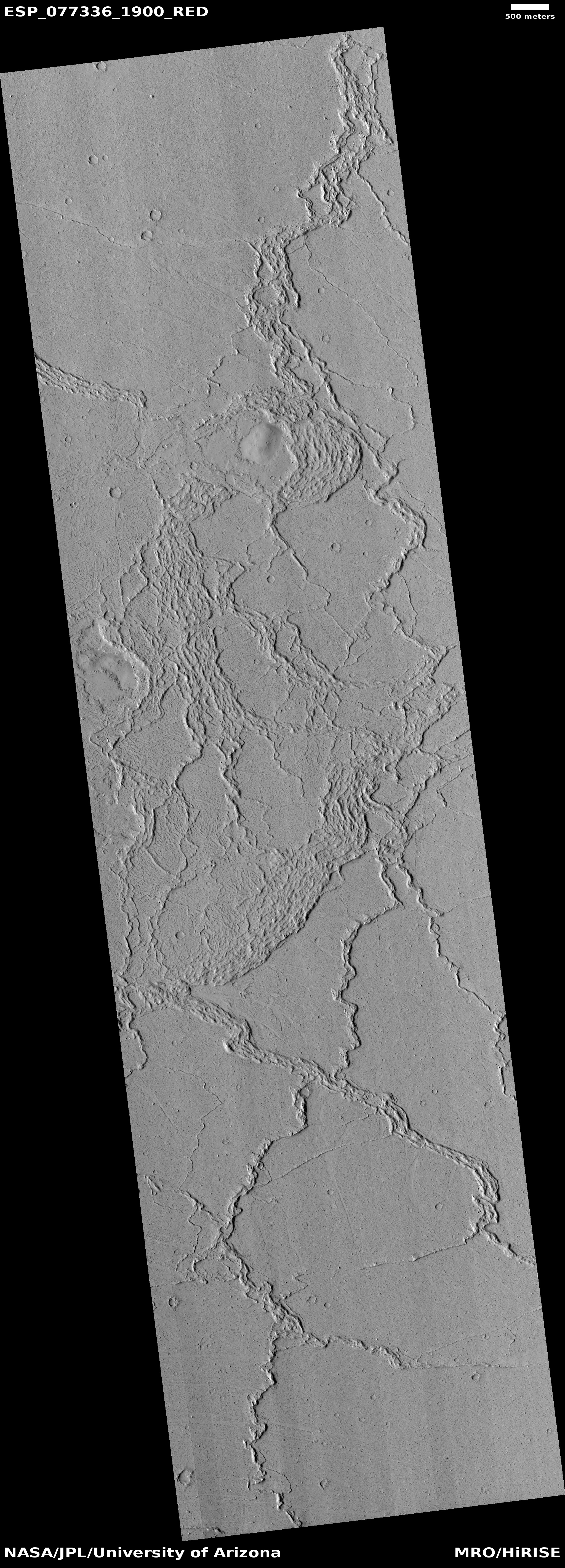
Today’s cool image illustrates once again the importance of looking not simply at the picture but at the surrounding larger context in order to understand the Martian features within the photograph.
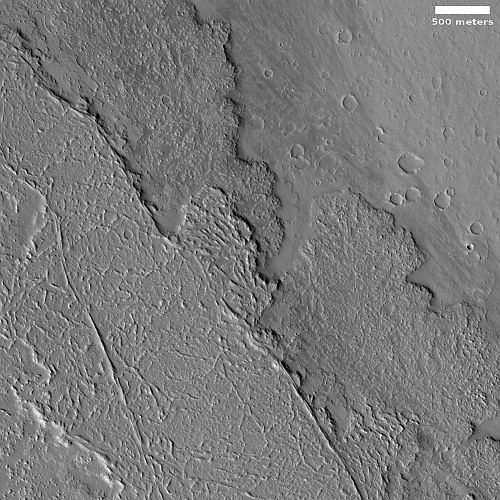
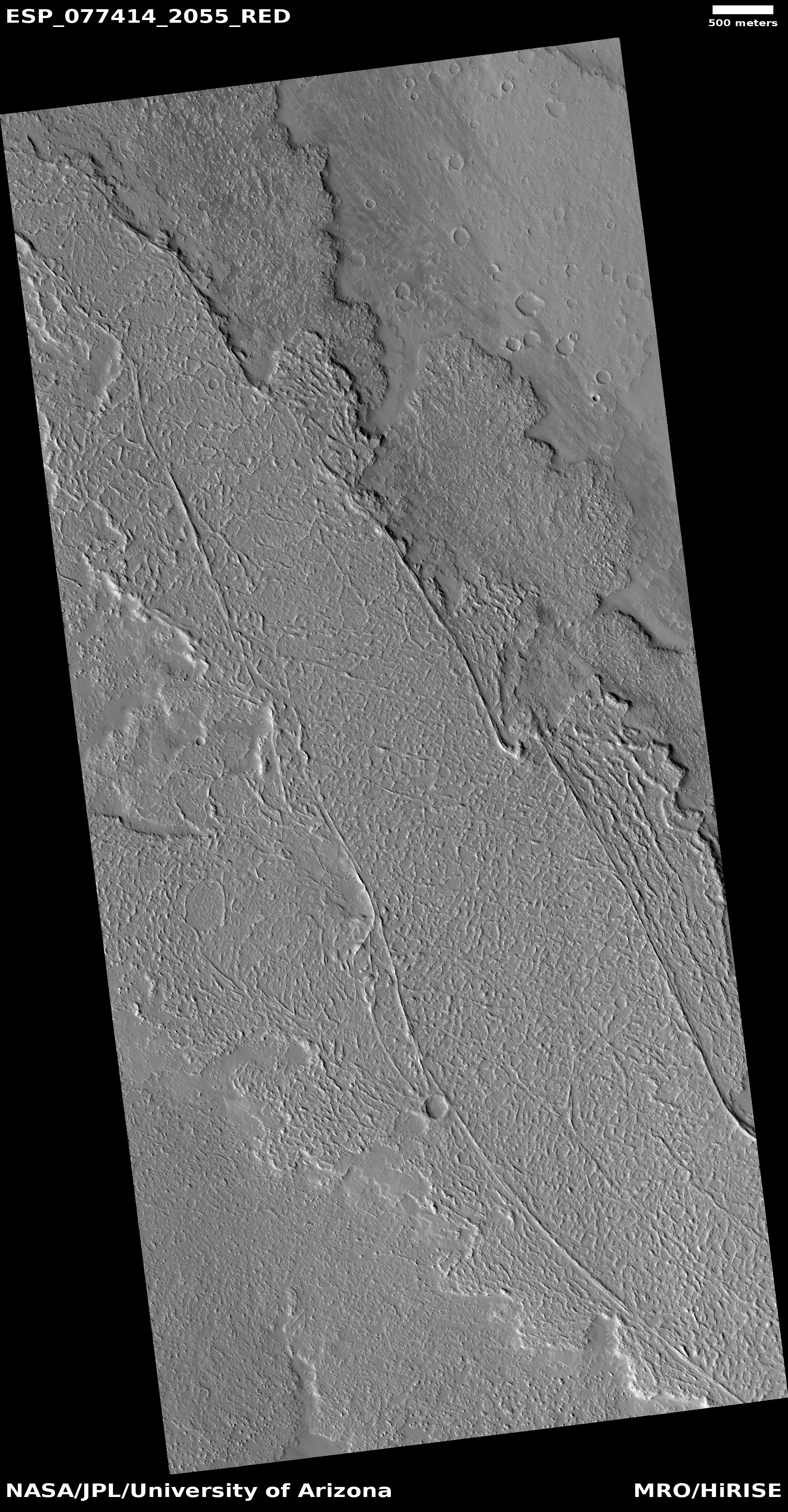
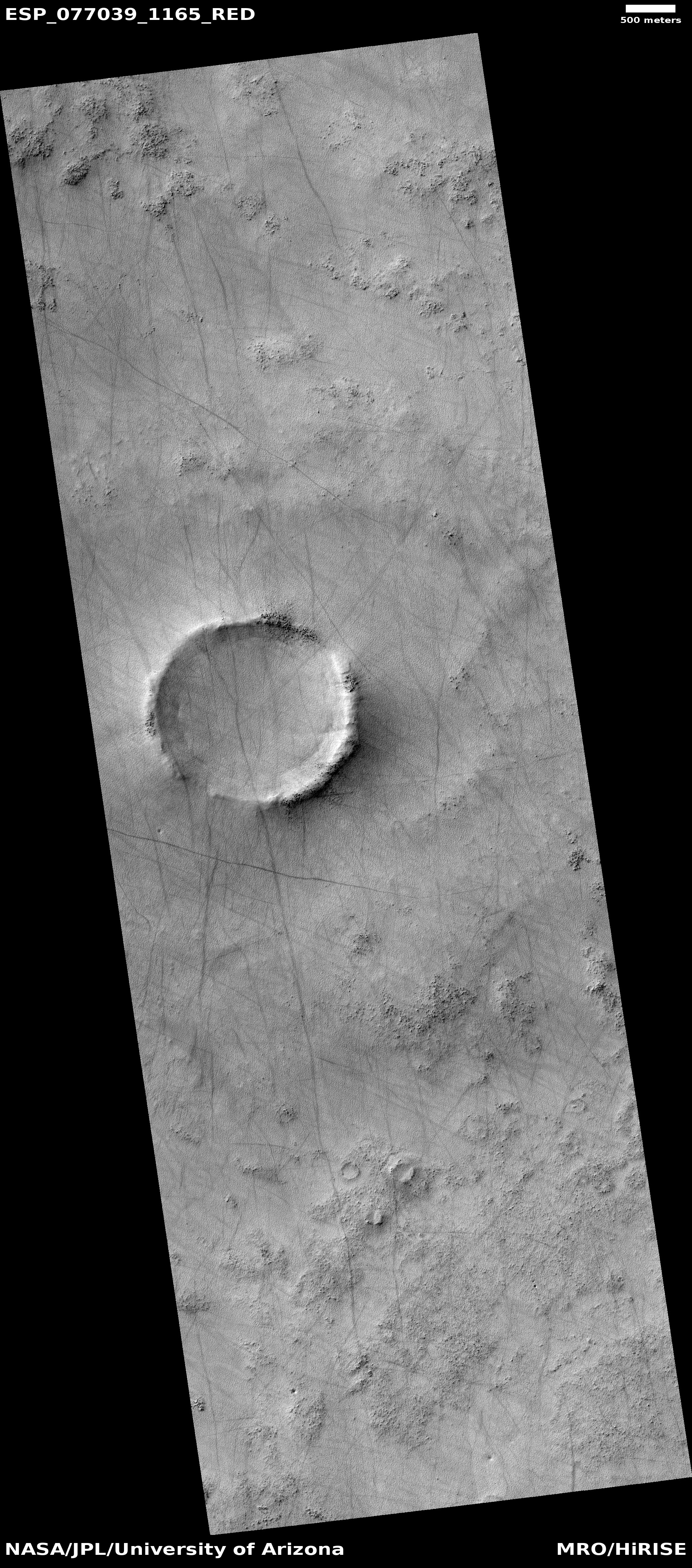
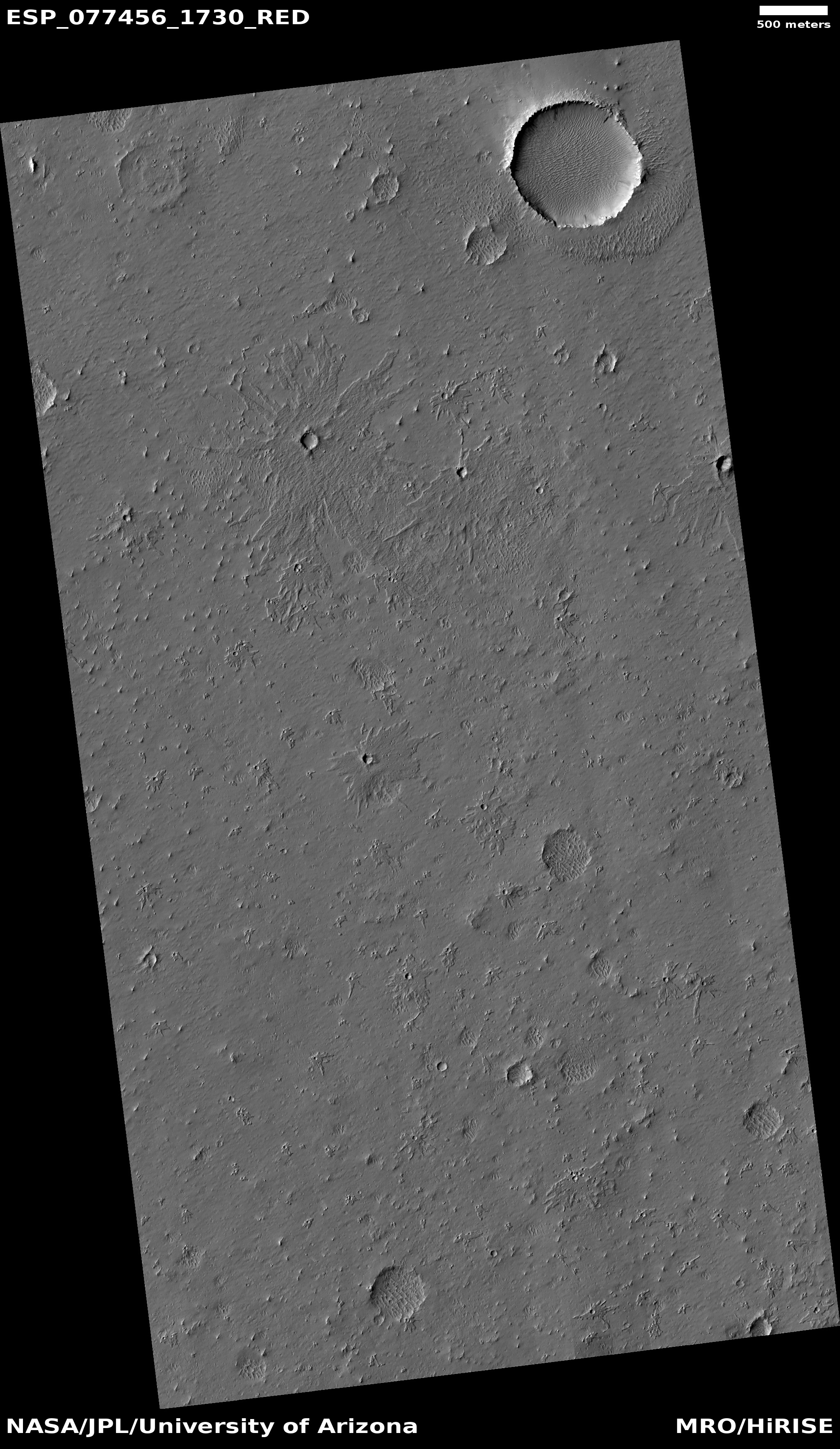
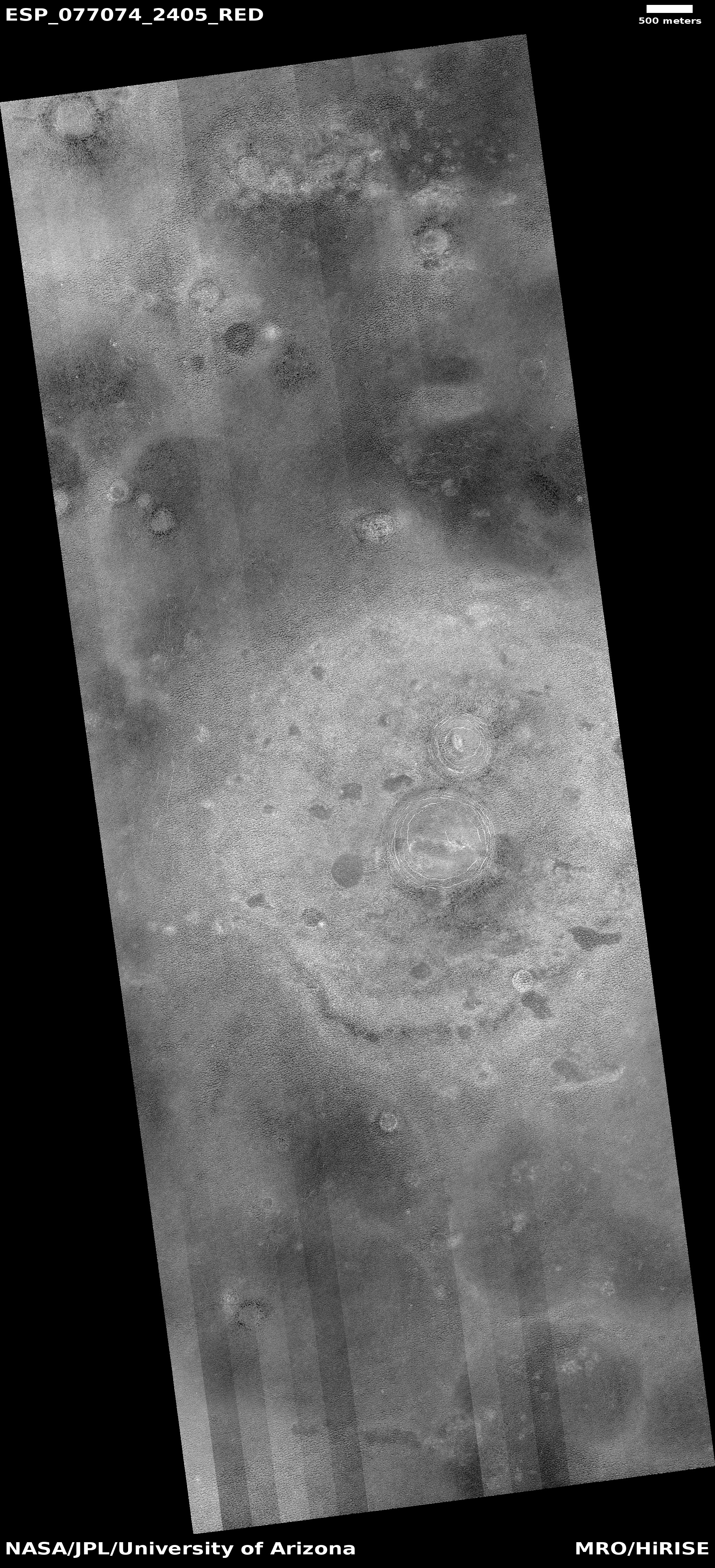
The photo to the left, cropped, reduced, and sharpened to post here, was taken on January 31, 2023 by the high resolution camera on Mars Reconnaissance Orbiter (MRO). The location is at 26 north latitude, so it is in the dry equatorial regions. It shows what appears to be a large Martian flood lava plain, with at least two different flood lava events appearing to flow to the northeast, with the second only partly covering the first.
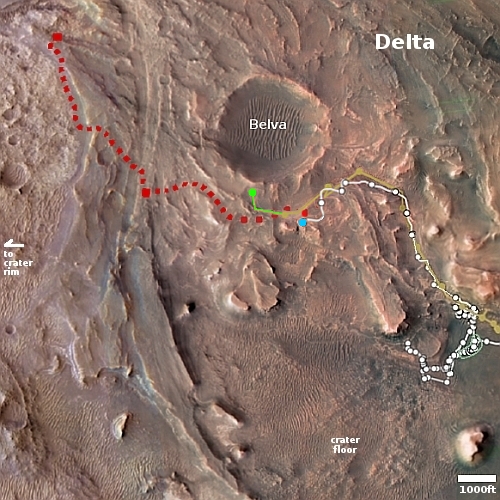
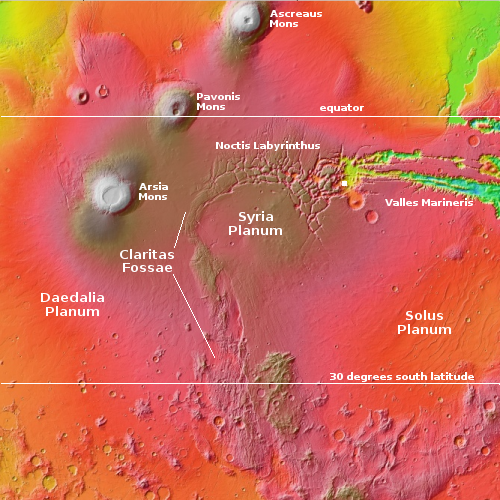
From this high resolution image it seemed probable that the source of the flow was from the southwest, an assumption that at first glance is strengthened by the overview map below.
» Read more
Click for original image.
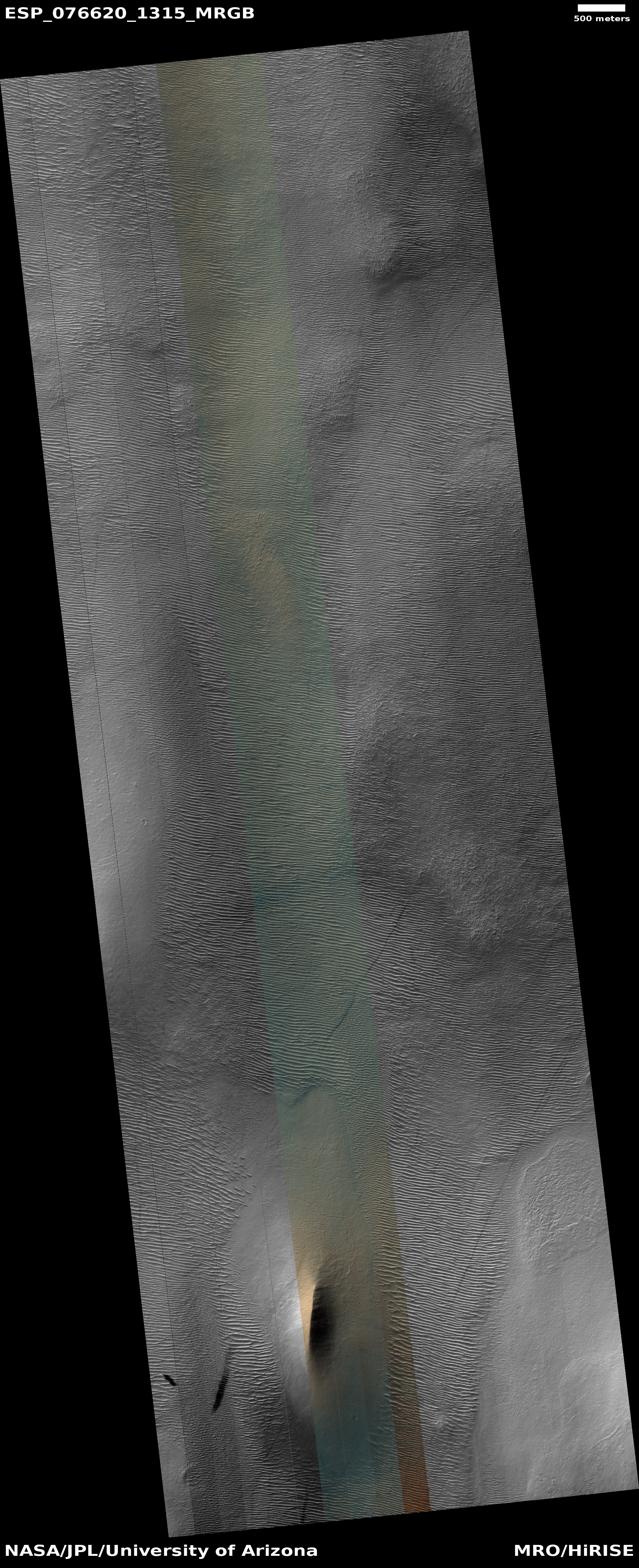
Today’s cool image illustrates once again the importance of looking not simply at the picture but at the surrounding larger context in order to understand the Martian features within the photograph.
The photo to the left, cropped, reduced, and sharpened to post here, was taken on January 31, 2023 by the high resolution camera on Mars Reconnaissance Orbiter (MRO). The location is at 26 north latitude, so it is in the dry equatorial regions. It shows what appears to be a large Martian flood lava plain, with at least two different flood lava events appearing to flow to the northeast, with the second only partly covering the first.
From this high resolution image it seemed probable that the source of the flow was from the southwest, an assumption that at first glance is strengthened by the overview map below.
» Read more








{kind=link}
{kind=link}