Curiosity looks downhill at past travels
Click for original image.
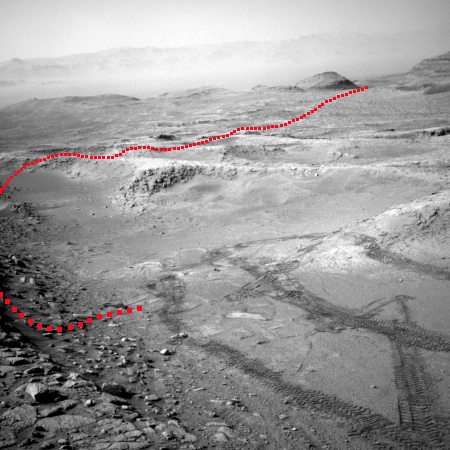
Cool image time! The picture to the right, cropped, reduced, and sharpened to post here, was taken on November 6, 2025 by the left navigation camera on the Mars rover Curiosity.
The picture looks north across Gale Crater, its distant rim about 20-30 miles away barely visible in the dusty atmosphere. In the foreground can be seen Curiosity’s recent tracks, showing how the science team had it travel back and forth several times, probably to check out several different interesting nearby ground features, as well as see how the ground changed by that travel. The rover has been traveling in an area called boxwork, a series of small intercutting ridges and hollows. Several of those ridges can be seen just beyond the tracks.
The red dotted line indicates my rough estimate as to the rover’s route uphill to get to this point, traveling up and to the left and following ridges just out of view.
» Read more

Click for original image.
Cool image time! The picture to the right, cropped, reduced, and sharpened to post here, was taken on November 6, 2025 by the left navigation camera on the Mars rover Curiosity.
The picture looks north across Gale Crater, its distant rim about 20-30 miles away barely visible in the dusty atmosphere. In the foreground can be seen Curiosity’s recent tracks, showing how the science team had it travel back and forth several times, probably to check out several different interesting nearby ground features, as well as see how the ground changed by that travel. The rover has been traveling in an area called boxwork, a series of small intercutting ridges and hollows. Several of those ridges can be seen just beyond the tracks.
The red dotted line indicates my rough estimate as to the rover’s route uphill to get to this point, traveling up and to the left and following ridges just out of view.
» Read more







{kind=link}
{kind=link}