China’s Zhurong rover successfully lands on Mars
The new colonial movement: China’s today successfully landed its Zhurong rover on the northern lowland plains of Mars dubbed Utopia Planitia.
China’s lander and rover began their descent to the surface at about 4:00 p.m. EDT (2000 GMT) by separating from the Tianwen-1 orbiter, which since March has been used to capture imagery of the targeted landing site for study. An aeroshell protected the stacked probes as they plunged into the atmosphere at 3 miles per second (4.8 km per second), generating tremendous heat in the process.
Once inside the atmosphere, while traveling at supersonic speeds, the spacecraft deployed a 2,150-square-foot (200 sq. meter) parachute to slow its approach to less than 328 feet per second (100 m per second). China based the canopy design on the parachutes it has used on Shenzhou missions to return astronauts to Earth.
Finally, the Tianwen-1 lander fired thrusters similar to the type on China’s Chang’e lunar landers to make the final descent. A laser range finder and a velocity sensor helped guide the craft as it hovered at about 328 feet (100 m) to identify obstacles and measure the slopes of the surface before touching down safely.
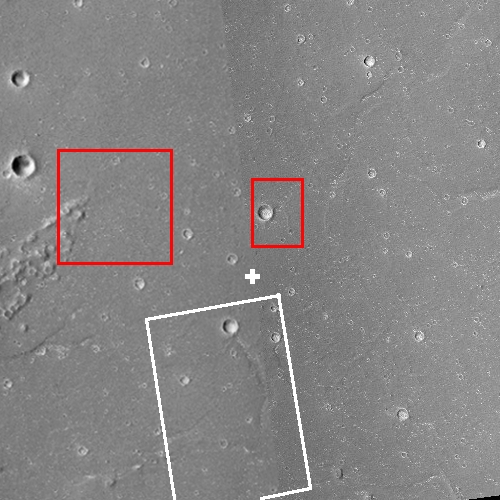
We don’t yet know the exact touchdown point. The image above is a mosaic of two wide angle photos from the context camera on Mars Reconnaissance Orbiter (MRO), with the white cross marking the spot previously leaked by the Chinese press as the landing site. The white box shows the area covered by the only high resolution MRO photo, as of October 2020. Since then MRO has taken a number of additional high resolution images of this area. The red boxes are the areas covered by the only two high resolution images released by China from its Tianwen-1 Mars orbiter
Note that the rover is actually not yet on the ground. It still sits on the lander. A ramp will be deployed and it will then roll down on the ground to begin what China says is a planned 90 day mission, with the most important data likely coming from the rover’s ground penetrating radar, looking for underground ice.
The new colonial movement: China’s today successfully landed its Zhurong rover on the northern lowland plains of Mars dubbed Utopia Planitia.
China’s lander and rover began their descent to the surface at about 4:00 p.m. EDT (2000 GMT) by separating from the Tianwen-1 orbiter, which since March has been used to capture imagery of the targeted landing site for study. An aeroshell protected the stacked probes as they plunged into the atmosphere at 3 miles per second (4.8 km per second), generating tremendous heat in the process.
Once inside the atmosphere, while traveling at supersonic speeds, the spacecraft deployed a 2,150-square-foot (200 sq. meter) parachute to slow its approach to less than 328 feet per second (100 m per second). China based the canopy design on the parachutes it has used on Shenzhou missions to return astronauts to Earth.
Finally, the Tianwen-1 lander fired thrusters similar to the type on China’s Chang’e lunar landers to make the final descent. A laser range finder and a velocity sensor helped guide the craft as it hovered at about 328 feet (100 m) to identify obstacles and measure the slopes of the surface before touching down safely.
We don’t yet know the exact touchdown point. The image above is a mosaic of two wide angle photos from the context camera on Mars Reconnaissance Orbiter (MRO), with the white cross marking the spot previously leaked by the Chinese press as the landing site. The white box shows the area covered by the only high resolution MRO photo, as of October 2020. Since then MRO has taken a number of additional high resolution images of this area. The red boxes are the areas covered by the only two high resolution images released by China from its Tianwen-1 Mars orbiter
Note that the rover is actually not yet on the ground. It still sits on the lander. A ramp will be deployed and it will then roll down on the ground to begin what China says is a planned 90 day mission, with the most important data likely coming from the rover’s ground penetrating radar, looking for underground ice.