
Is China’s Yutu-2 lunar rover dead?
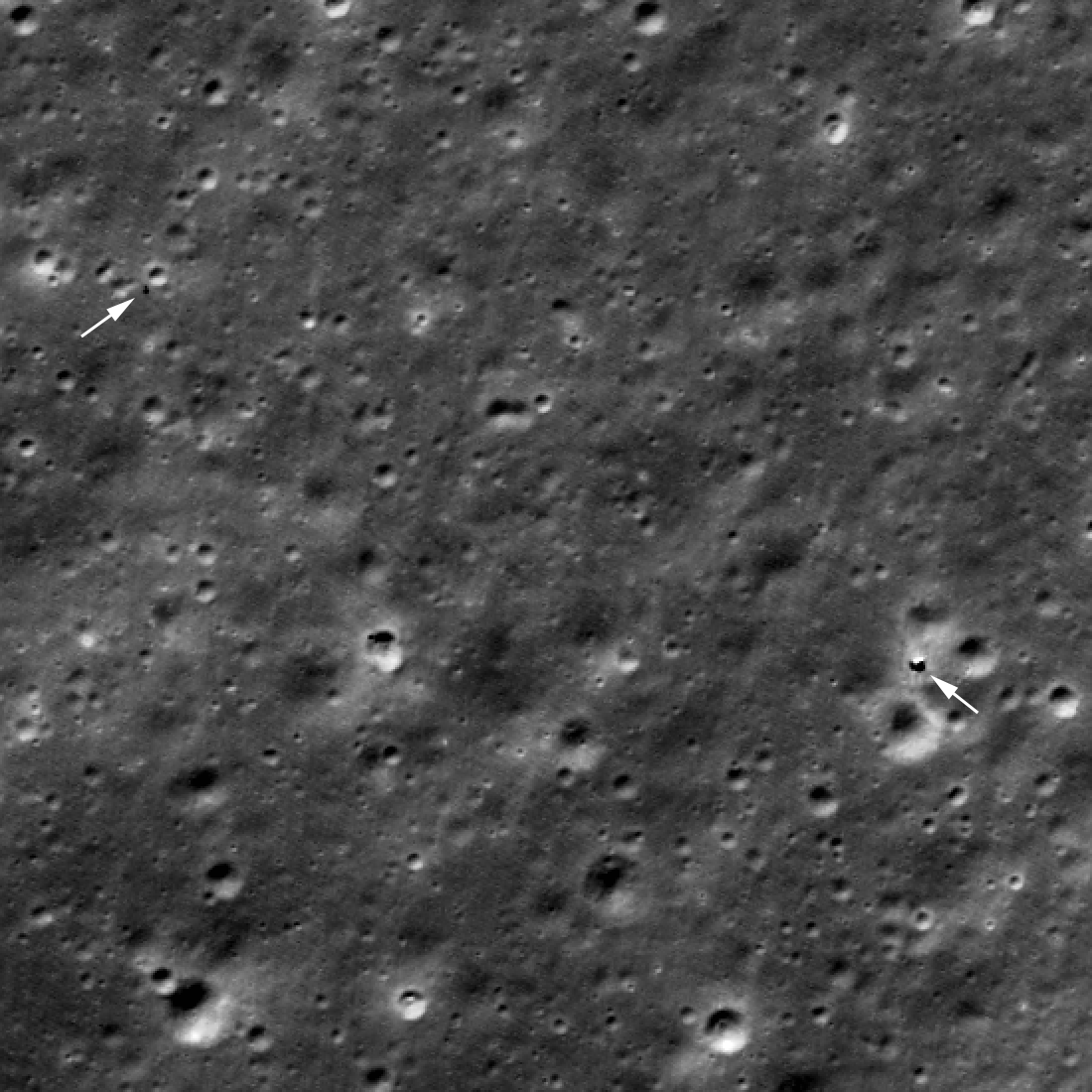
According to monthly images taken by Lunar Reconnaissance Orbiter (LRO) of China’s Yutu-2 lunar rover on the far side of the Moon, it has not moved since March 2024, suggesting it is no longer functioning.
“Up to about February 2023 the rover was moving about 7 or 8 metres every drive and typically about 40 m per lunar day. Suddenly the drives dropped to about 3 or 4 m each and only about 8 or 10 m per lunar day,” Stooke said in an email.
“That lasted until about October 2023, and then drives dropped to only 1 or 2 m each. In March 2024 Yutu 2 was resting just southwest of a 10 m diameter crater, and it’s been there ever since, as revealed by LRO images,” Stooke added.
It is possible the rover is not entirely dead, but there is no way to be sure. China is not generally forthcoming when things fail. For example, it has never acknowledged the shut down of its Zhurong Mars rover, which it had hoped would survive its first Martian winter. When that winter ended however no reports from Zhurong were released by China, which suggested it was no longer functioning. China however did not report this. It simply made believe the rover no longer existed.
It could be China is now doing the same with Yutu-2.
According to monthly images taken by Lunar Reconnaissance Orbiter (LRO) of China’s Yutu-2 lunar rover on the far side of the Moon, it has not moved since March 2024, suggesting it is no longer functioning.
“Up to about February 2023 the rover was moving about 7 or 8 metres every drive and typically about 40 m per lunar day. Suddenly the drives dropped to about 3 or 4 m each and only about 8 or 10 m per lunar day,” Stooke said in an email.
“That lasted until about October 2023, and then drives dropped to only 1 or 2 m each. In March 2024 Yutu 2 was resting just southwest of a 10 m diameter crater, and it’s been there ever since, as revealed by LRO images,” Stooke added.
It is possible the rover is not entirely dead, but there is no way to be sure. China is not generally forthcoming when things fail. For example, it has never acknowledged the shut down of its Zhurong Mars rover, which it had hoped would survive its first Martian winter. When that winter ended however no reports from Zhurong were released by China, which suggested it was no longer functioning. China however did not report this. It simply made believe the rover no longer existed.
It could be China is now doing the same with Yutu-2.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}