
Curiosity tops a ridge to see its rough path forward

Click for original image.
Click for interactive map
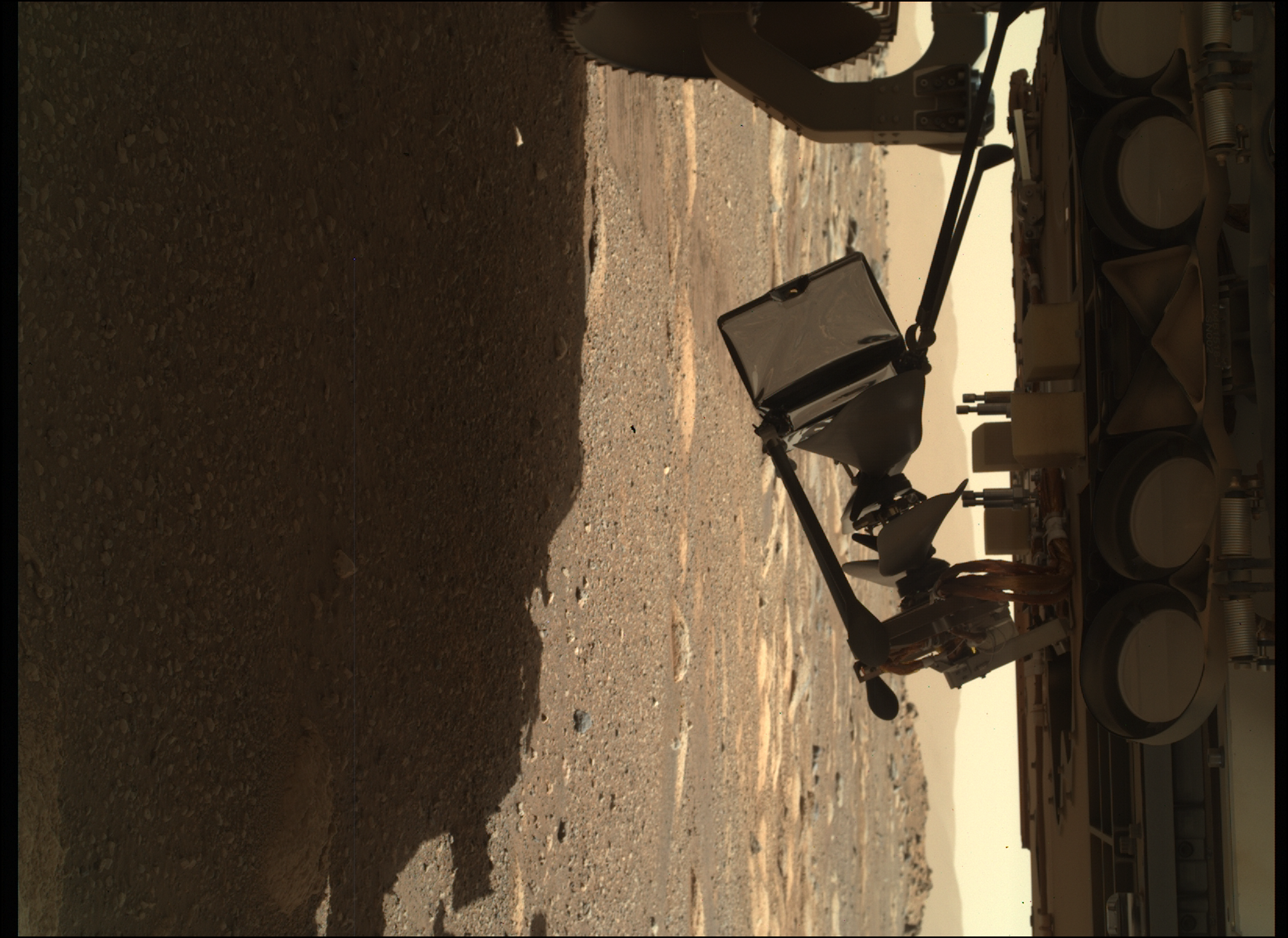
After more than a month of struggle to get Curiosity to maneuver uphill through a very rocky and steep terrain, the science team today finally announced that the rover had topped the ridge and could once again see its way forward into Gediz Vallis, the slot canyon it plans to use as its route up Mount Sharp.
The panorama above, cropped, reduced, sharpened, and annotated to post here, was taken on June 29, 2023 following Curiosity’s last move forward. The yellow lines on the overview map to the right indicate the approximate area covered by this panorama. The red dotted line on both images indicates Curiosity’s planned route, with the white dotted line its actual course.
The white ridge to either side of the central peak dubbed Kukenan is actually the higher flanks of Mount Sharp. The peak of Kukenan is about a half mile away and about 400 feet higher, with those white flanks about 2.5 miles beyond. The actual peak of Mount Sharp is about 25 miles farther south and about 17,000 feet higher.
The panorama makes clear that the path forward is not going to be any less rough for Curiosity and its damaged wheels. Expect progress to be slow for many months to come.

Click for original image.

Click for interactive map
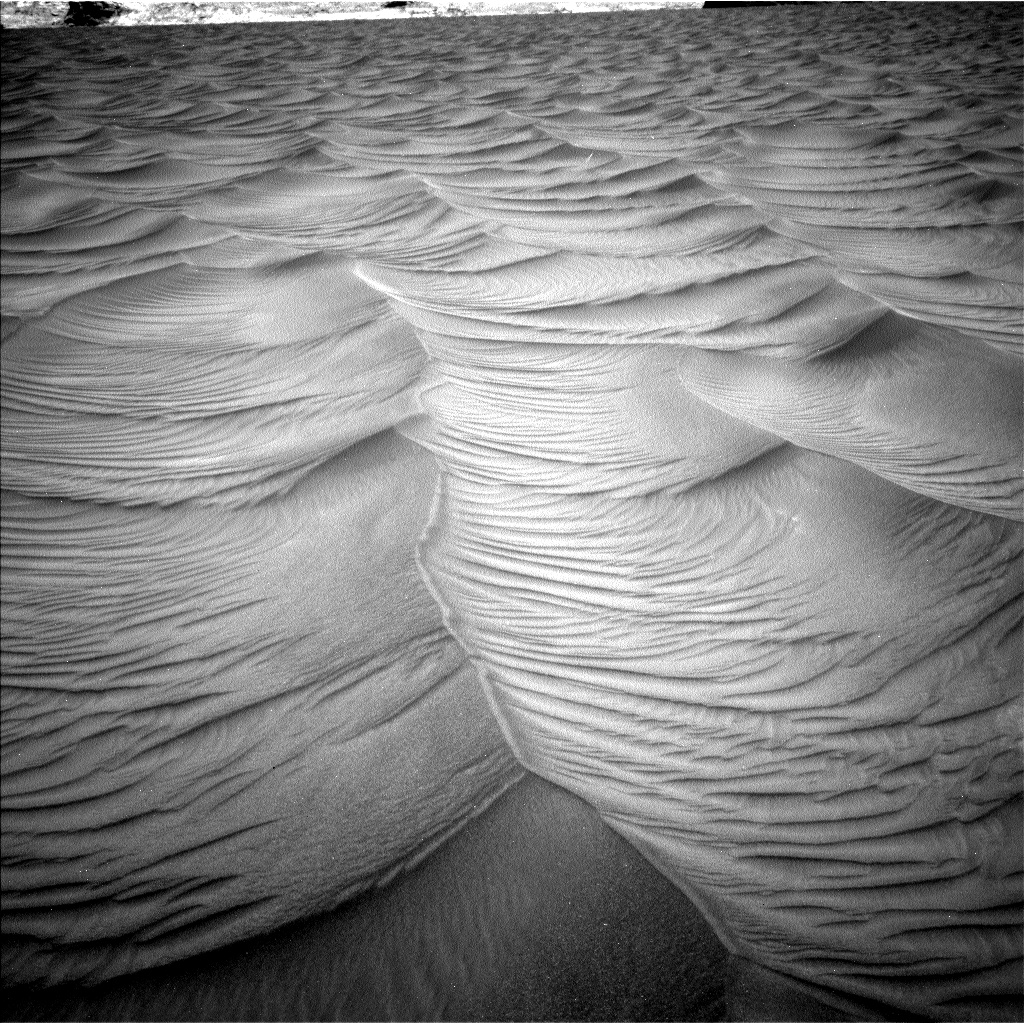
After more than a month of struggle to get Curiosity to maneuver uphill through a very rocky and steep terrain, the science team today finally announced that the rover had topped the ridge and could once again see its way forward into Gediz Vallis, the slot canyon it plans to use as its route up Mount Sharp.
The panorama above, cropped, reduced, sharpened, and annotated to post here, was taken on June 29, 2023 following Curiosity’s last move forward. The yellow lines on the overview map to the right indicate the approximate area covered by this panorama. The red dotted line on both images indicates Curiosity’s planned route, with the white dotted line its actual course.
The white ridge to either side of the central peak dubbed Kukenan is actually the higher flanks of Mount Sharp. The peak of Kukenan is about a half mile away and about 400 feet higher, with those white flanks about 2.5 miles beyond. The actual peak of Mount Sharp is about 25 miles farther south and about 17,000 feet higher.
The panorama makes clear that the path forward is not going to be any less rough for Curiosity and its damaged wheels. Expect progress to be slow for many months to come.








{kind=link}
{kind=link}
{kind=link}
{kind=link}